Tal y como indica el título de ésta nueva entrada del blog, acabo de terminar el proyecto que ya anticipaba con anterioridad. Se trata de conectar el
Kenwood TM-D710E a un
gps bluetooth y así aprovechar las buenas prestaciones que tienen (por lo menos los dos que yo tengo) a la par que eliminamos el cable de conexión al gps, de ésta forma el salpicadero del coche quedará mucho mas limpio de cables ya que la conexión se realiza
de forma inalámbrica.
Éste proyecto surge motivado por el afán de
cacharrear principalmente y no se repara en costes del material que calculo podría ascender a unos 15€. Supongo que para algunos que ya tengan funcionando la emisora con un gps por cable, puede no resultar atractivo, pero yo creo que es un proyecto interesante y tampoco estamos hablando de unas cantidades elevadas. Por otra parte y no menos importante, la experiencia sobre éste tipo de interfaces (BT a Serie) es muy interesante debido a que hay muchos otros dispositivos que usan el puerto serie a los que se les puede implementar ésta solución.
Decía que las características de los gps bluetooth que yo tengo son mejores y es cierto, ésto se nota claramente en
el tiempo de adquisición de los satélites que es mucho
más rápido que en el Haicom (por cable). Para mi, éste es un punto
super importante, ¿no os ha pasado alguna vez que ponéis el gps en el coche ya con un destino fijado y hasta más de la mitad del camino no ha logrado posicionarse el gps? Pues casi siempre que pongo el gps del teléfono móvil, que es de pascuas a ramos también es cierto, me pasa y
me fastidia sobremanera.
Placa bluetooth, recoge los datos del gps bluetooth y los entrega por su puerto serie al TM-D710E en un nivel adecuado.
Uno de los gps bluetooth que tengo es de la marca
QStarz y aunque lo compré hace ya unos años, es
una auténtica maravilla cómo captura satélites. Fué un poco caro pero es posiblemente unos de los mejores gps del mercado, ni comparación con el
Haicom. Se habló mucho de él y realizaron pruebas objetivas en
Pcdemano.com cuando entonces era el mejor gps del mercado. Me consta que hay modelos más actuales con las mismas "tripas" pero con diferente marca: Konet, Transystem i-blue, todos incorporan el chipset
MTK II que posee muy buenas características. El otro gps bluetooth es un
Holux que está muy bien aunque lo he cacharreado menos, éste también lleva el MTK II.
Esquema eléctrico de la placa bluetooth.
Bueno, el objetivo del proyecto ya está contado, ahora hay que pensar cómo lo podemos
implementar. Buscando por ebay localicé unas plaquitas bluetooth que son configurables mediante comandos AT a través de un RS232 y permiten funcionar como maestro o esclavo y por supuesto parearse con otro dispositivo bluetooth y realizar la conexión.
Lo más interesante es que las puedes programar para que
siempre se enlacen con el mismo dispositivo de forma automática nada mas esté en cobertura. Las placas incorporan un puerto bluetooth, un puerto serie y un puerto usb (éste no viene conectado aunque ya lo investigaré).
La cadena de conexión sería la siguiente: gps Bluetooth enlazado con la placa via bluetooth y ésta vía cable con el frontal para la entrada de datos del gps (mini-jack). Por otro lado y para obtener
alimentación para la placa debemos hacer un
by-pass en la línea que viene del cuerpo de la emisora hacia el frontal y que acaba en un RJ45. Tengo que analizar cual es el consumo de la placa porque podríamos evitar éste by-pass colocando una
pequeña batería.
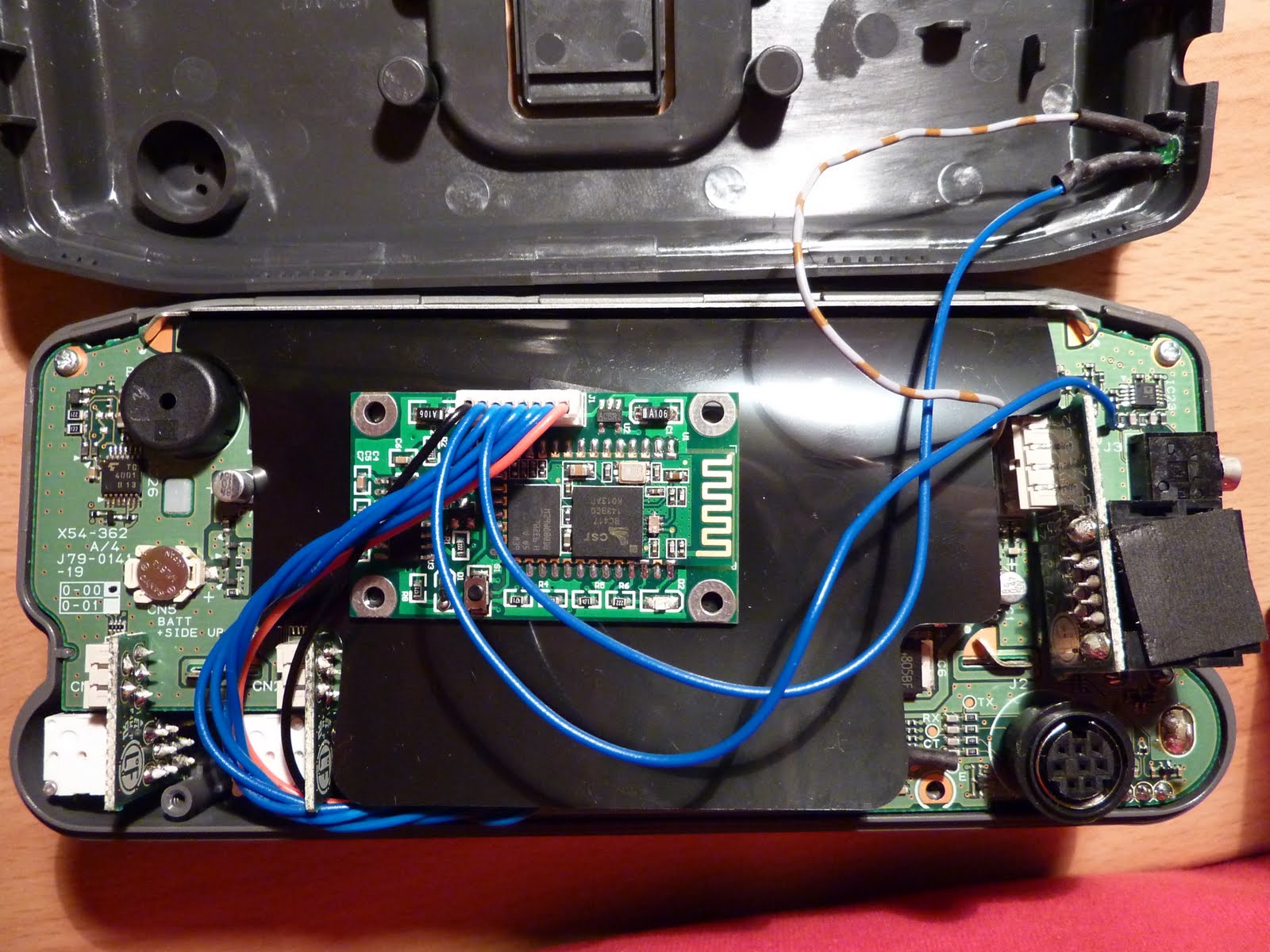
Placa bluetooth con todas las conexiones suministradas.
La unidad, tiene dos modos de funcionamiento:
1.- Modo comandos.
2.- Modo normal.
En el modo
"comandos", la placa es configurable por el puerto RS232 mediante comandos AT. Para alcanzar éste modo es necesario poner un nivel alto en el
pin 34 del módulo bluetooth y alimentar la placa. Se hace cómodamente presionando el pulsador que se trae la unidad. Podemos saber que estamos en modo comandos porque el led que indica el modo de trabajo (también viene implementado en la placa) parpadea con una cadencia aproximada de
1 sg.
En el modo
"normal" el led parpadea con mucha más frecuencia y a intervalos irregulares. Se alcanza ése modo con tan solo alimentar la placa. En éste modo, la unidad funciona en base a la configuración que tenga almacenada en memoria.
Para dar una idea de los
parámetros que podemos configurar tenemos entre otros los siguientes:
- Rol: master o esclavo.
- Velocidad de puerto serie UART.
- Nombre del dispositivo.
- Estado del dispositivo.
- Password de conexión bluetooth.
- Busqueda de otros dispositivos.
- Pareado con otros dispositivos.
- Dispositivo enlazado.
- etc.
Las unidades vienen con unos parámetros de conexión serie establecidos y son:
38400,8,n,1. Si nos conectamos por Hyperterminal es necesario activar el
"eco local" y
"enviar CRLF al final de linea automáticamente", ésto lo encontramos dentro de los parámetros de configuración de la conexión del hyperterminal referente a los valores ASCII.
Pantalla de configuración ASCII del Hyperterminal.
Indicar que
siempre debemos conectarnos con
esos parámetros para poder acceder al modo comandos. Por otro lado, la
UART de la unidad es configurable y podemos definir otros parámetros de velocidad, paridad y bits de stop para el
funcionamiento normal. Este es en concreto nuestro caso, porque el TM-D710E no acepta más de
9600bps.
Hyperterminal a 38400-8-N-1 durante la configuración del módulo con comandos AT.
Un ejemplo de la secuencia de comandos necesarios para configurar la unidad:
Antes de nada, debemos
conectarnos con la unidad por el puerto serie y entrar
en modo comandos, para ello debemos usar
38000,8,N,1 como parámetros de conexión del puerto serie. Debemos presionar y mantener el pulsador de la placa y darle alimentación asegurandonos que está en modo comandos a través de
la cadencia del led que indica el modo de trabajo, que debe ser de aproximadamente
1sg. También tenemos que identificar la
direccion física del gps bluetooth al que nos queremos conectar. Sugiero
utilizar un PC con conexión bluetooth,
establecer un enlace con el gps y en las características de la conexión con el dispositivo conseguir éste valor.
Hyperterminal configurado a 9600-8-N-1 leyendo los datos que recibe el TM-D710E del GPS.
-
AT+ROLE=1 Modo de trabajo como master para que pueda iniciar una conexión bluetooth.
-
AT+BIND= 1234,56,abcdef Siendo "1234,56,abcdef" la dirección física del gps 12:34:56:ab:cd:ef.
-
AT+PSWD=0000 Ajusta el password de conexión a 0000 que es el standard del gps.
-
AT+UART=9600,0,0 Ajusta el valor del puerto serie a 9600bps, bits stop 1 y no paridad.
Con
éstos parámetros estaría
configurada la unidad como
Máster, con la UART a
9600,8,N,1, password de conexión:
0000 y con
enlace automático al gps de dirección física:
12:34:56:ab:cd:ef.
Placa bluetooth en funcionamiento. LED azul "modo de trabajo". LED verde "pareado".
Las primeras unidades que me enviaron debían estar
defectuosas porque no he conseguido hacerlas funcionar. Las segundas adquiridas a otro vendedor que me inspiraba mucha mas confianza
funcionan perfectamente, además se incluye todo lo necesario para conectar, configurar y funcionar. Las placas son muy completas y versátiles, disponen de un conector dónde tenemos disponibles
todas las conexiones interesantes:
- +Vcc
- RX_TTL.
- TX_TTL.
- LED modo de funcionamiento.
- LED de estado de pareado.
- RX_232
- TX_232
- Masa
Como podéis observar tenemos disponible las líneas
RX y TX tanto en niveles
TTL como
RS232 pues implementa un
MAX232 en la propia placa. Esto le hace muy versatil para conectar con sistemas
TTL o
RS232. El
TM-D710E sólo acepta niveles
RS232 y debemos utilizar las líneas
RX_232 y TX_232.
GPS bluetooth con la placa conectada al TM-D710E.
En la imagen anterior, se aprecia la conexión al puerto serie y la conexión USB de dónde estoy sacando exclusivamente la alimentación de la placa de una manera rápida.
La verdad es que he tenido que
echarle unas horitas para
familiarizarme con el funcionamiento de la unidad, pero finalmente
todo funciona como esperado.
Queda pendiente el mecanizado en la caja-mochila que se adosará en la parte trasera del frontal.
Como el
tamaño de las placas es bastante reducido 4 x 3cm, lo
óptimo es colocarla en una pequeña
caja-mochila adosada a la parte trasera del frontal mediante velcro.
Continuará...